Robotics Engineering
Manufacturing facilities around the world are increasing adoption of industrial robots to increase automation and maintain competitiveness. In both the US and China particularly, application of industrial robots is on the rise. Sales of industrial robots grew by 66 percent in the past 5 years alone in the USA, according to the International Federation of Robots.
Robots all have some kind of mechanical construction, a frame, form or shape designed to achieve a particular task. For example, a robot designed to travel across heavy dirt or mud, might use caterpillar tracks. There must also be electrical components which power and control the machinery. For example, the robot with caterpillar tracks would need some kind of power to move the tracker treads. The electrical aspect of robots is used for movement via motors, with built-in sensors delivering electrical signals in order to measure things like sound, position, and even basic vision.
Autonomous robots are well-suited to perform tasks that are dangerous and often repetitive, as well as to function in extreme environments such as space, under the oceans, or at high altitudes. NASA tests robots for exploration in areas called analogs. Analogs are places where the environment is similar to locations like Mars or the moon, where a robot may be used.
Another field in which robots are finding a niche is in medical applications. Although still in its infancy, robotic surgery has already proven itself to be of great value, particularly in areas inaccessible to conventional laparoscopic procedures. Robotic technology is set to revolutionize surgery by improving and expanding laparoscopic procedures, minimizing invasiveness, and allowing remote operation.
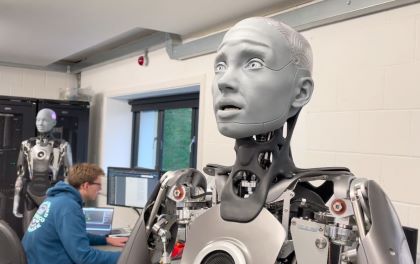
Humanoid Robots
Humanoid robots are constructed in such a way that they mimic the human body, so they use actuators that perform like muscles and joints, though with a different structure. To achieve the same effect as human motion, humanoid robots use mainly rotary actuators. They can be either electric, pneumatic, hydraulic, piezoelectric or ultrasonic. While electric coreless motor actuators are better suited for high speed and low load applications, hydraulic ones operate well at low speed and high load applications. Piezoelectric actuators generate a small movement with a high force capability when voltage is applied. They can be used for ultra-precise positioning and for generating and handling high forces or pressures in static or dynamic situations.
Sensors can be classified according to the physical process with which they work or according to the type of measurement information that they give as output. Vision refers to processing data from any modality which uses the electromagnetic spectrum to produce an image. In humanoid robots it is used to recognize objects and determine their properties. Sound sensors allow humanoid robots to hear speech and environmental sounds, and perform as the ears of the human being. Microphones are usually used for this task.
Robotics - Undergraduate
Mechanical engineers typically need a bachelor's degree in mechanical engineering or mechanical engineering technology. Mechanical engineering programs usually include courses in mathematics and life and physical sciences, as well as engineering and design. Mechanical engineering technology programs focus less on theory and more on the practical application of engineering principles. They may emphasize internships and co-ops to prepare students for work in the robotics industry.
A Professional Engineering (PE) license, which allows for higher levels of leadership and independence, can be acquired later in one's career. Licensed engineers are called professional engineers (PEs). A PE can oversee the work of other engineers, sign off on projects, and provide services directly to the public. The initial PE exam can be taken after earning a bachelor's degree. Engineers who pass this exam are commonly called engineers in training (EITs) or engineer interns. After meeting work experience requirements, EITs and EIs can take the second exam, called the Principles and Practice of Engineering. Each state issues its own licenses, although most states recognize licensure from other states, as long as the licensing state's requirements meet or exceed their own.
Robotics Curriculum
Introduction to Robots
This course provides a broad overview of robotics, exploring its history, core principles, and diverse applications in industries like manufacturing, healthcare, and exploration. Students learn about robot components, including sensors, actuators, and control systems, and are introduced to the Robot Operating System (ROS) for simulation and control. Topics include basic kinematics, sensor integration, and the societal impact of robotics. Hands-on labs involve programming simple robots to perform tasks like navigation and object detection. The course sets the foundation for understanding robotics as autonomous systems interacting with physical environments.
[](https://robotics.cs.rutgers.edu/pracsys/courses/intro-to-computational-robotics/)[](https://www.cs.rutgers.edu/academics/undergraduate/course-synopses/course-details/01-198-460-introduction-to-computational-robotics)
- History and evolution of robotics
- Introduction to ROS and simulation tools
- Basic sensor and actuator principles
- Applications in real-world domains
Robot Programming
Students learn to program robots using Python and C++, focusing on real-time control and embedded systems. The course covers software frameworks like ROS, middleware for sensor integration, and communication protocols. Assignments include programming robots for tasks like path following and obstacle avoidance. Emphasis is placed on writing efficient, modular code for robotic applications, preparing students for advanced control and perception tasks. The course also introduces version control and debugging in robotics software development.
[](https://robotics.cs.rutgers.edu/pracsys/courses/intro-to-computational-robotics/)[](https://www.cs.rutgers.edu/academics/undergraduate/course-synopses/course-details/01-198-460-introduction-to-computational-robotics)
- Python and C++ for robotics programming
- ROS for robot control and simulation
- Real-time embedded systems
- Version control and debugging techniques
Control Systems
This course covers the design and implementation of control systems for robotics, including PID controllers, state-space methods, and feedback control. Students explore stability, controllability, and observability in multi-input, multi-output (MIMO) systems. Practical applications include trajectory tracking and force control in robotic manipulators. Labs involve implementing control algorithms on simulated and physical robots, with a focus on real-time performance and robustness.
[](https://mae.rutgers.edu/robotics-certificate)[](https://www2.eecs.berkeley.edu/Research/Areas/CIR/)
- PID and state-space control methods
- Stability and robustness analysis
- Trajectory tracking algorithms
- Real-time control implementation
Computer Vision for Robotics
This course introduces computer vision techniques for robotic perception, including image processing, object detection, and visual navigation. Students learn about camera calibration, stereo vision, and motion detection, with applications in autonomous robots. The course covers libraries like OpenCV and deep learning frameworks for visual tasks. Projects involve implementing vision algorithms for tasks like obstacle detection and object tracking, emphasizing real-world robotic applications.
[](https://www2.eecs.berkeley.edu/Courses/EEC106A_99/)[](https://ece.rutgers.edu/graduate-courses)
- Image processing and feature extraction
- Camera calibration and stereo vision
- Deep learning for object detection
- Visual navigation and SLAM integration
Robotic Sensors and Actuators
Students explore sensor and actuator technologies critical to robotics, including LIDAR, ultrasonic sensors, servo motors, and piezoelectric actuators. The course covers sensor fusion, signal processing, and actuator control for precise robotic operation. Labs involve integrating sensors and actuators into robotic systems for tasks like navigation and manipulation. Emphasis is placed on selecting appropriate hardware for specific robotic applications, such as autonomous vehicles or industrial robots.
[](https://www2.eecs.berkeley.edu/Courses/EEC106A_99/)
- Sensor types: LIDAR, ultrasonic, tactile
- Actuator types: servo, pneumatic, piezoelectric
- Sensor fusion and signal processing
- Hardware selection for robotic tasks
Machine Learning
This course explores machine learning techniques for robotic perception, decision-making, and control. Topics include supervised learning, reinforcement learning, and deep learning for tasks like object recognition and motion planning. Students use frameworks like PyTorch to develop models for robotic applications. Projects involve training models for tasks like grasping or navigation, with a focus on integrating learning with physical systems. The course also covers ethical considerations in autonomous systems.
[](https://ece.rutgers.edu/graduate-courses)
- Supervised and reinforcement learning
- Deep learning for perception and control
- Integration with physical robotic systems
- Ethical implications of autonomous robots
Swarm Robotics
This course studies multi-robot systems and emergent behaviors in swarm robotics. Students learn coordination algorithms, distributed control, and communication protocols for swarm systems. Topics include swarm intelligence, formation control, and applications in search and rescue or environmental monitoring. Projects involve simulating swarm behaviors using ROS and analyzing scalability and robustness. The course emphasizes interdisciplinary approaches to large-scale robotic systems.
[](https://www.cs.rutgers.edu/error-page)
- Swarm intelligence and coordination algorithms
- Distributed control and communication
- Formation control and task allocation
- Applications in large-scale robotic systems
Robotics & Computer Science Jobs
Mechanical engineers held about 288,800 jobs in 2017. The median annual wage for mechanical engineers was $84,190 in May 2017. Most mechanical engineers work full time, and about a third worked more than 40 hours a week in 2017. Employment of mechanical engineers is projected to grow 10 percent over the coming deacde. In the automotive industry in particular, mechanical engineers will play key roles in improving the range and performance of factory robots on the production line.
The Robotic Industries Association (RIA) reported that the world market for industrial robots is driven primarily by demand from motor vehicle manufacturing, followed by the electronics industry. US manufacturers that design and produce industrial robots include Adept Technology, Genmark Automation, Rethink Robotics, and SAGE Automation. In addition to automotive robots, these companies produce robots for the electronics, medical, and logistics industries.
| Links below list current openings: | Starting Salary
(up to) |
10 Year Salary
(up to) |
| Aerospace Engineers | $89,260 | $124,550 |
| Aircraft Mechanics | $39,300 | $71,780 |
|
Android Apps | $84,350 | $97,900 |
| Architects | $69,760 | $104,970 |
| Biotechnology | $70,900 | $129,510 |
| Chemists | $66,040 | $106,310 |
| Civil Engineers | $72,120 | $104,420 |
| Electrical Engineers | $78,900 | $115,240 |
| Environmental Engineers | $72,590 | $106,230 |
|
Graphic Design | $49,300 | $58,000 |
| Industrial Engineering | $70,630 | $100,980 |
| Maintenance Technician | $63,230 | $73,810 |
|
Linux/Perl/C++ | $79,920 | $95,350 |
| Mechanical Engineers | $63,230 | $94,690 |
|
.NET Developer | $88,620 | $108,000 |
|
Network Analysts | $65,230 | $91,550 |
| Robotics
| $82,160 | $92,550 |
|
Solar Energy | $81,050 | $104,930 |
|
Software Development | $79,920 | $95,250 |
| Surveying |
$23,640 | $43,140 |
|
SWIFT, iOS | $85,400 | $110,720 |
| Technical Writers | $60,850 | $91,720 |
| Urban Planners | $58,940 | $86,880 |